






Mini Hex Grasshopper 300 FPV Baubericht
(It’s Dead!)
FPV Mini Race Hex Copter. Es handelt sich dabei um den Mini Hex Grasshopper 300 Spider. Ich habe mich für dieses Frame bei n-Factory entschieden, da er optisch toll aussieht und auch preislich interessant ist.

Fertig ist er 🙂 das kleine Biest, Mini Hex Grasshopper 300
oder so

mit XIAOMI Yi Kamera und 4S Lipo unten
Setup
► Frame MiniHex Grasshopper 300, n-Factory 79.90 Euro
► Naze 32 Flugcontroller, Hobbyking 29.99 $
► ZTW Mantis 12A Regler 3S-4S, Goodluckbuy 14.33 $
► RCTimer Motoren 1806-2300KV, RCTimer 11.89 $
► GemFan 5030 Props, Banggood 1.15 $ (1 Paar)
► FrSky D4R-II 2.4G 4CH ACCST Telemetry Empfänger, Banggood 28 $
► Mobius Full HD Sports Camera, Banggood 66 $
► FPV Kamera Fatshark CMOS 700VTL
► FPV Videosender
► MinimOSD, Banggood 11 $
► Power Distribution Board and Dual UBEC, Hobbyking 13 $
oder alternative die beiden UBEC Regler (5V und 12V)
► Hobbywing 3A UBEC 5V 6V Switch, Banggood 4.90 $
► Hobbyking UBEC 12V, Hobbyking 7.60 $
► Pipser für Naze32, Hobbyking 2.99 $
► Turnigy nano-tech 2200mah 4S 45~90C, Hobbyking 30 $
Totalpreis ca. 480 CHF (Ohne FPV-Brille und Lipo)
Das Frame
Ein paar Bilder vom Frame und dem Distribution Board. Mein Ziel ist, das Board zw. die untersten Platten zu bringen. Die Regler werden dort vermutlich nicht rein passen, da die Befestigung (Klettband) des Lipos auch dort an der untersten Platte sein wird.


Distribution Board auf der Unterseite

Auf die untere Platte kommen die Lipo Bänder
Stromversorgung
Die nötigen Kabel für 5V, 12V und 14.8V wurden auf das Distribution Board gelötet.
Stromversorgung 12 Volt
– FPV Kamera Sony
– FPV Sender ImmersionRC
– LED Leuchte hinten ev. auch vorne
– OSD Minim oder Simple Mini OSD
– Reserve
Stromversorgung 5 Volt
– Naze32 FC
– Reserve
Stromversorgung 14.8 Volt
– OSD Anzeige/Überwachnung
– 6 Motoren

Die nötigen Kabel werden auf das Board gelötet
Unterseite mit Doppelseitigem Klebeband
So sieht das Ganze von unten aus. Die Öffnungen für die beiden Klettbänder (Lipo) haben so noch genug Platz.
Ansicht von unten, genug Platz vorhanden
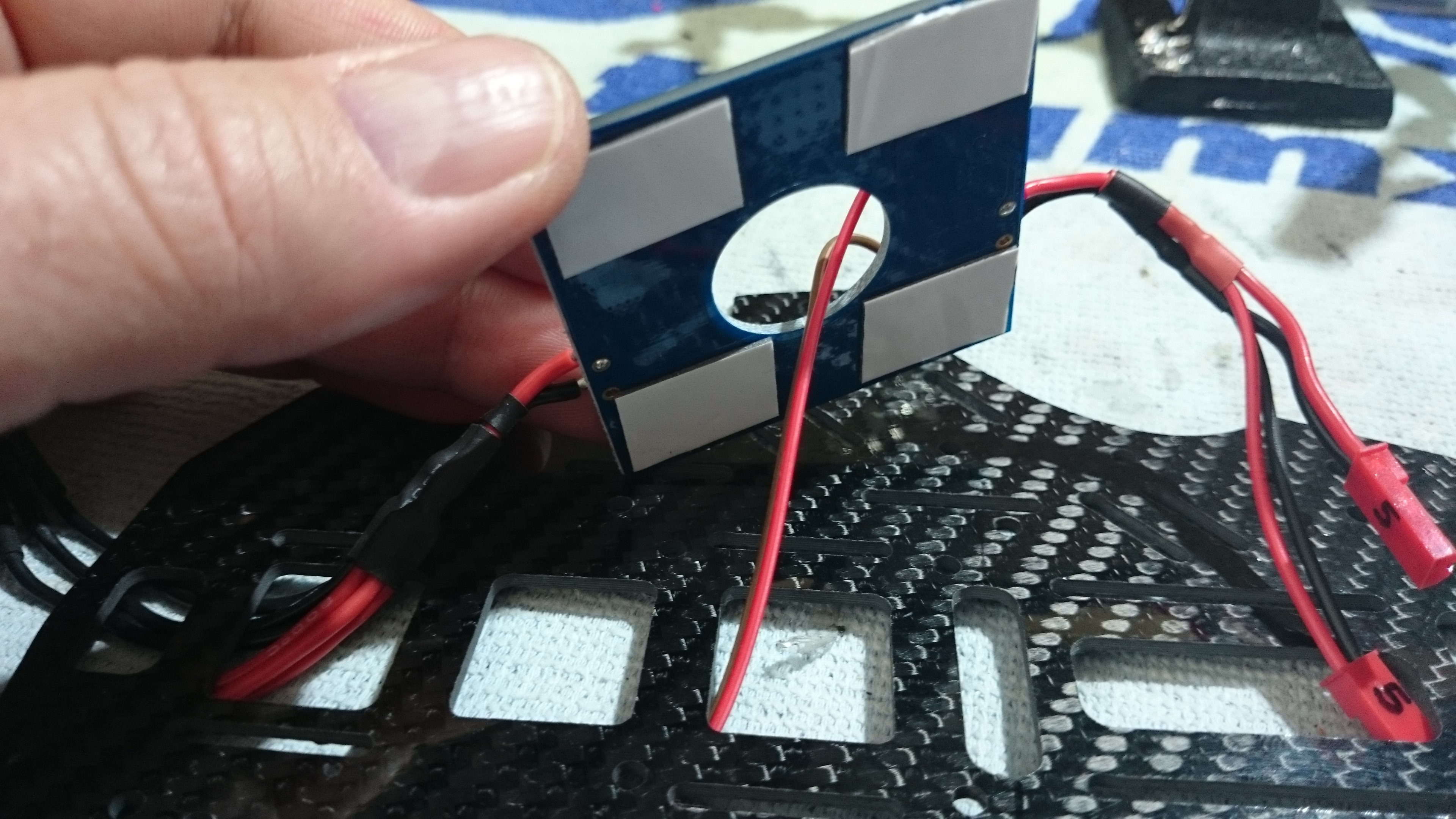
Anschliessend werden rote und schwarze Kabel (24AWG) an das Distribution Board gelötet. Diese werden oben mit den Reglern verlötet.

Kabel für die 6 Regler verlötet
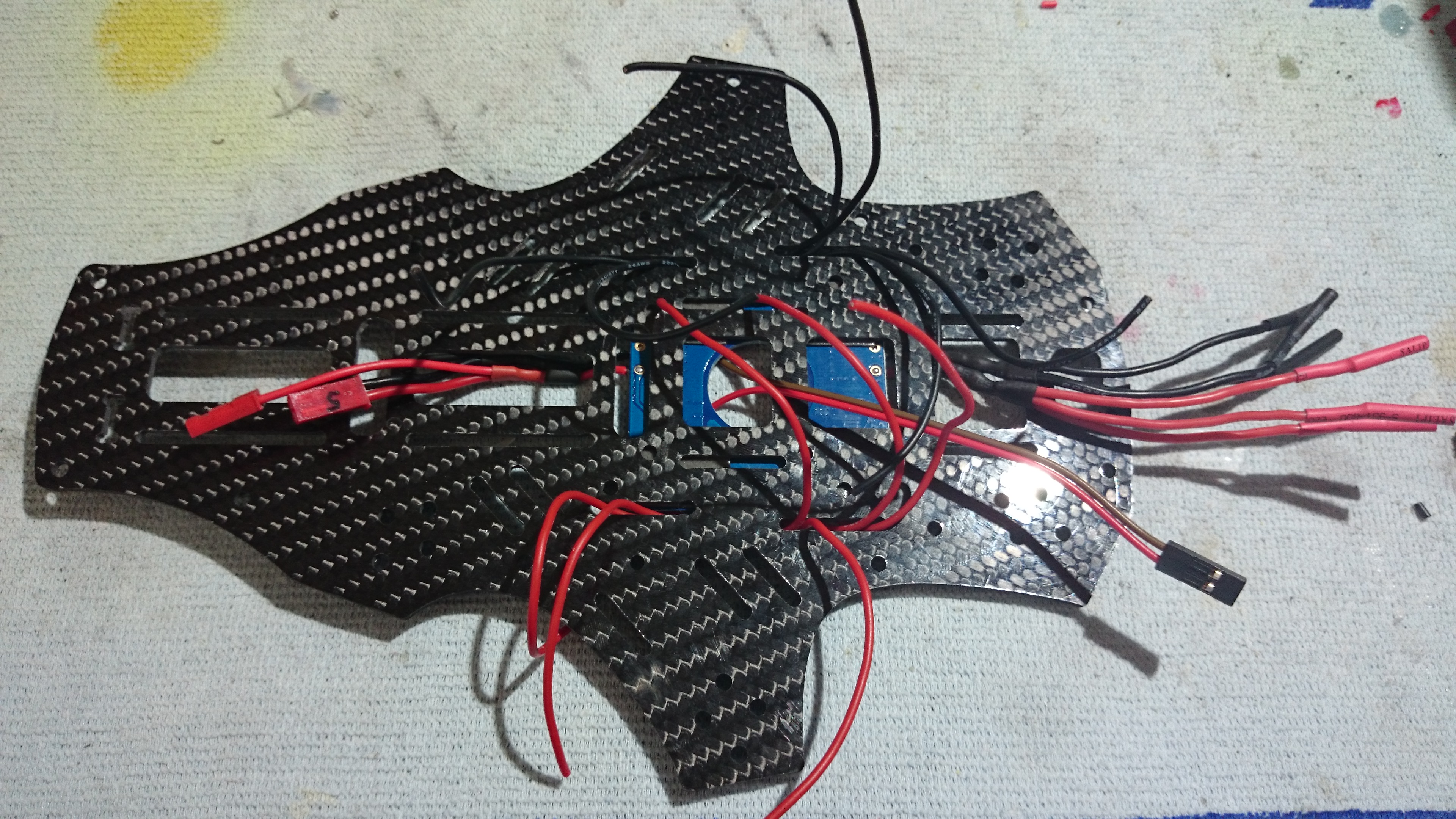
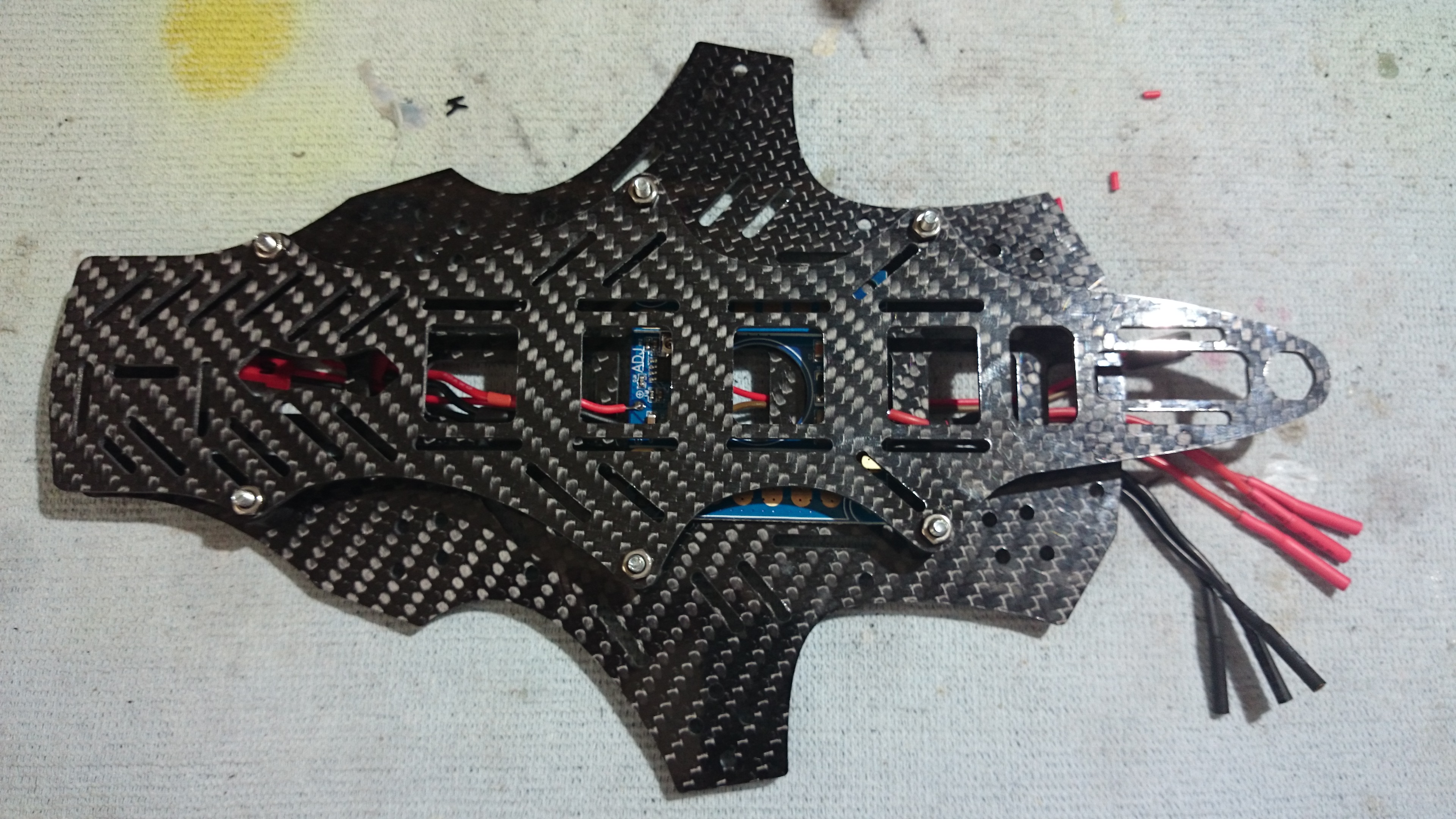
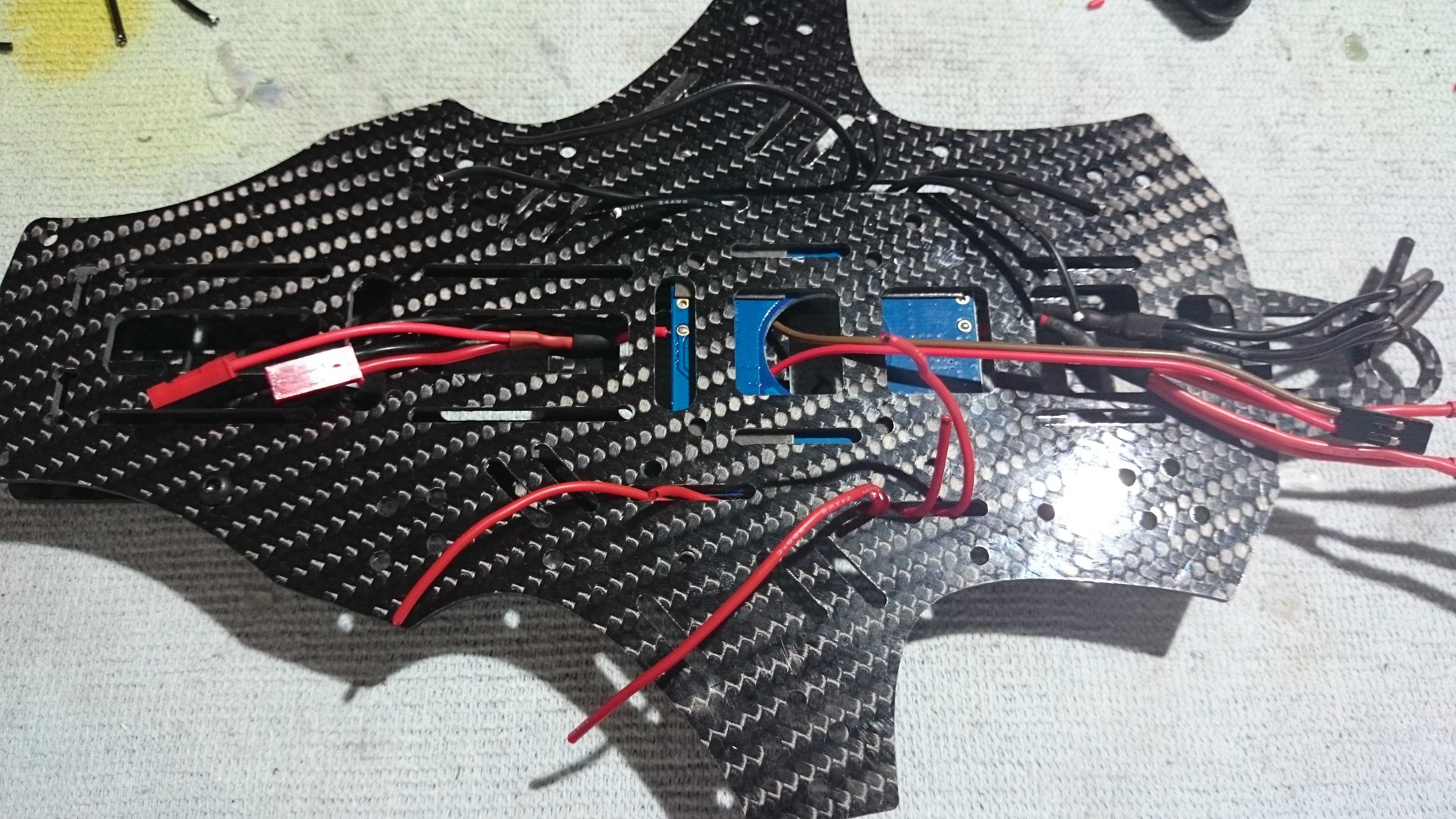
Alle Kabel durchgezogen auf die andere Seite
Diese Kabel werden auf eine möglichst kurze länge gekürzt. Dabei werden alle 6 Punkte, wo die Armen befestigt werden, geprüft. Die Position wird markiert mit Tipp-Ex oder beim roten Kabel mit einem schwarzen Marker.

Prüfen der Länge mit einem Arm

Mit Wasserfestem Stift oder Tipp-Ex markieren
gekürzt sieht es etwa so aus
Motoren und Regler
Dann werden die Motoren auf jeden Arm mit den Regler provisorisch befestig. Die Kabel werden auf die richtige Länge gekürzt und verlötet. Es ist eine knifflige Arbeit da es mit dem Schrumpfschlauch schwierig wird das Ganze sauber zu verschliessen. Aber auch das bringe ich hin, habe da nur etwas länger. Eine andere Möglichkeit wäre mit PlastiDip. Den bekommt man beim Conrad.

Knifflig das Ganze, aber es geht

So sollte es dann aussehen
Da ich die Motoren wegen der Drehrichtung nicht mehr umlöten möchte, falls der Motor auf die falsche Seite dreht. Bezeichne ich jeden Arm unten mit der Drehrichtung des Motors. So habe ich am Schluss bei der Befestigung die Übersicht welcher wie dreht.

Von unten gesehen dreht der Motor nach links, mit Pfeil markiert
Das sind die 6 Ausleger, auf drei Motoren muss ich noch warten. Ich habe die Servokabel zur Hälfte mit Kabelsleeves eingefasst. Der offene Teil ohne die Sleeves wird zwischen den Platte nicht zu sehen sein. Habe rot gewählt und nicht grün, da die Distanzbolzen schon rot sind und rot etwas kräftiger aussieht mit dem Carbonschwarz.

Das Naze32 Rev.5
Das Naze32, habe sämtliche Pins drauf gelötet. Lieber vorher alle, als später das Ganze noch zerlegen müssen.


Verlöten & Verschrauben
Die Regler habe ich mit den Kabel vom Power Board verlötet. Die Kabel kommen alle zwischen die zwei Platten (Sandwich) und werden nicht zu sehen sein. Nur die Kabel an das Naze32 und wenige Power Kabel (12V und 5V) kommen auf die obere Platte wo das Naze32, Videosender und FPV Kamera befestigt sind.


27.02.2015
Die Kabel werden anschliessend mit Klebeband auf die Platte geklebt, so dass alles möglichst flach ist. Es bleibt kaum Freiraum.

Wenn alles schön flach ist, kommt die Mittlere Platte mit dem FC drauf. Die Kabel werden durch die Öffnungen gezogen.


Nun wird alles verschraubt, gar nicht so einfach. Die Regler Anschlusskabel habe ich etwas zu kurz verlötet. Zum Teil sind die Kabel ziemlich straff gezogen. Hätte diese doch etwas länger sein lassen, im Nachhinein kann man die Kabel immer noch zw. den Platten versorgen. Tipp für dijenigen die den Aufbau auch so machen möchten, gebt den Kabel genug Länge.

Ein Teil der Kabel sind gelötet und verbunden. Am Empfänger Frsky D4R-II wird der Telemetry Ausgang mit dem Naze32 verbunden (Kabel blau und gelb). Für die Kanäle wird nur ein Servokabel benutzt (CPPM). Der Videosender wird mit einem Verlängerungskabel auf die oberste Platte geführt. Für das OSD benutze ich das Symple OSD oder das MinimOSD.

Das FC, oben rechts Anschluss Telemetry Frsky, Buzzer und Volt Monitor 4S / 3S

Unten der Videosender mit dem Verlängerungskabel, links weitere 12V Anschlusskabel

Frsky D4R-II Empfänger mit CPPM verbunden

alles fertig verkabelt inkl. MinimOSD

über dem Naze32 habe ich das MinimOSD
Der erste Test der Motoren und Regler über die Software Cleanflight hat perfekt funktioniert. Mit der Software Cleanflight muss ich mich noch vertraut machen. Bis jetzt kenne ich nur das MultiWii und das Naza. Aber die Oberfläche sieht ziemlich sympathisch aus.
FPV Kamera Halterung
Die FPV Kamera habe ich mit einer vom Kollege selbst entworfenen Halterung befestig. Die Halterung ist massiv und wurde so konstruiert, dass die Halterung auch bei einem festen Aufschlag nicht bricht. Zudem hat sie eine Neigung von 10%. So habe ich beim Vorwärtsflug nicht nur Wiese im Bild.
Wenn jemand Interesse hat, auch so eine Halterung für seinen MiniQuad oder Hex zu montieren. Der findet seine Kontaktdaten in der 3D Druck Ecke. Der Winkel kann nach Wunsch angepasst werden, kann auch gerade sein (ohne Schrauben und Muttern).




LED Beleuchtung
Obwohl ich die Orientieren des Copters beim FPV Flug auf Sicht nicht sehen muss (nur der Spooter) habe ich am Heck noch eine starke LED Beleuchtung (8 Bit WS2812 5050 RGB LED) montiert. Über Cleanflight ist es möglich die einzelnen LED zu programmieren. Zb. bei Roll links leuchtet eine LED links orange oder bei Vollgas leuchten alle rot. Um die LED zu benutzen muss bei Cleanflight, bei Setup die LED Beleuchtunge aktiviert werden. Das Signal wir dann über den Pin 5 am Naze32 ausgegeben. Die 5V für die LED-Leiste habe ich direkt vom Powerboard.

LED Anschluss, DIN, 4-7Volt und GND

DIN wird am Naze32 auf PIN 5 gelegt

LED Leuchte

Mit Heisskleber an den beiden Heckrohren

In Action sieht es etwa so aus






















